
Within the use case led by the Universidad Politecnica de Madrid, EXTRA-BRAIN is advancing next-generation artificial intelligence solutions to enhance the efficiency, agility, and safety of Search and Rescue (SAR) robots operating in disaster environments. By drawing inspiration from the neural architecture of the human brain and its learning mechanisms, the project aims to optimise real-time decision-making, enabling autonomous robots to navigate through complex terrains and debris with precision and reliability.
Images below illustrate the advances in integrating advanced simulation, real-world reconstruction, and field testing. They showcase a simulation environment designed to evaluate critical scenarios such as falls, energy consumption, and stability. The simulator allows extensive testing of different movement strategies. Based on multiple simulation results, the optimal trajectory is selected and then executed by the robot in real-world conditions. Furthermore, they present real-world deployment, where a quadrupedal robot operates in a disaster scenario with obstructed visibility and uneven terrain. An advanced perception system processes environmental data in real-time to ensure safe navigation.
By combining high-fidelity simulation with rigorous physical validation in the CAR Robotics Arena, EXTRA-BRAIN ensures the robustness and adaptability of
SAR robots. This approach redefines autonomous rescue operations, enhancing mission success rates and ultimately improving disaster response capabilities.
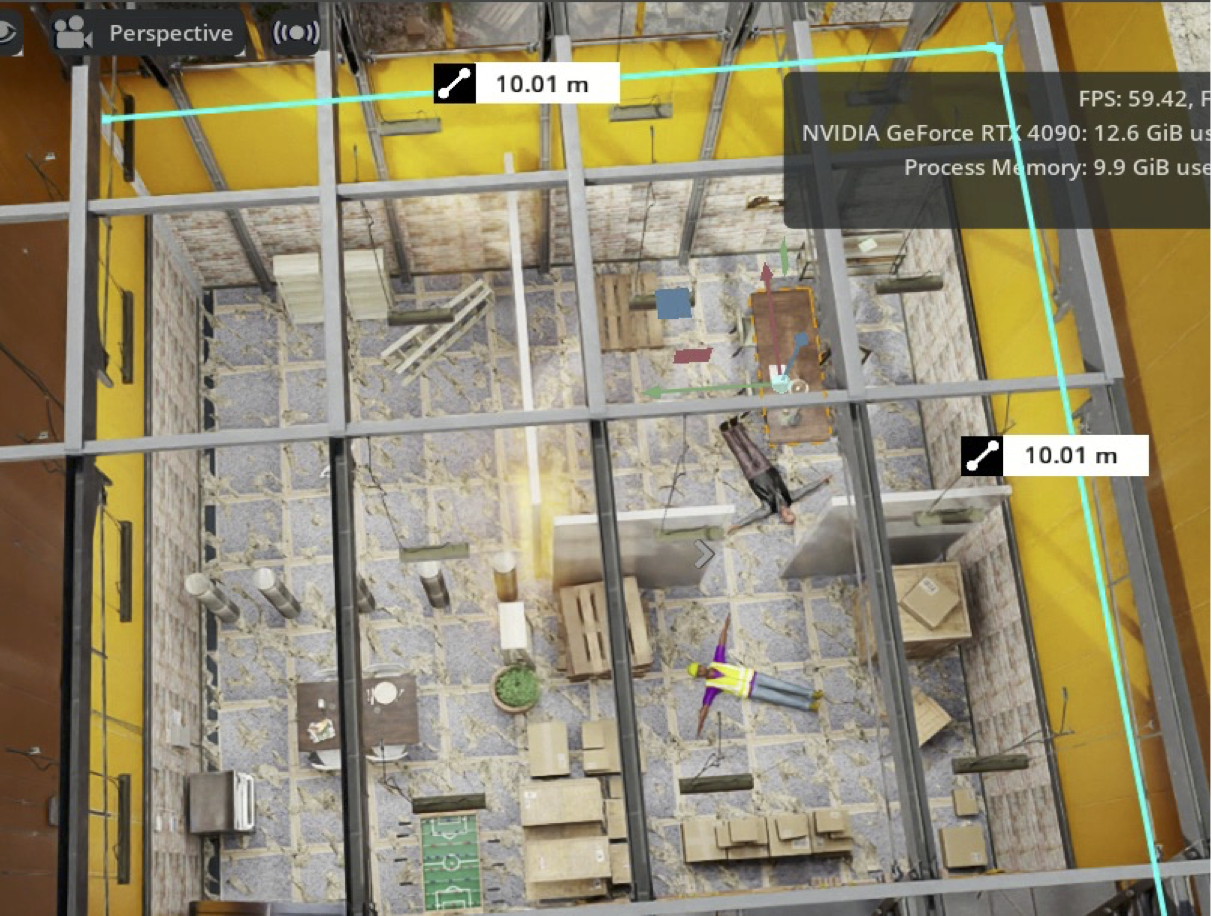
Simulation Environment in IsaacSim Evaluation

Defining Multiple Paths for Exploration

Robot Traversing Unstructured Ground and Perception System

Exploring Terrain in Poor Light Conditions